
Проблема: Клиенту требовалось разработать прототип механического манипулятора (мастер-слейв) для работы в мобильных химико-биологических лабораториях. Клиенту необходимо было иметь механический манипулятор (мастер-слейв) работающий без электрического источника питания.
Цель: Разработать и создать аналог роботизированного манипулятора Мастер-Слейв, применяя при этом бюджетные и легкодоступные компоненты, при этом не снижая уровня точности и качества манипулирования. Это предполагает поиск и использование экономичных альтернатив дорогим компонентам, обеспечение высокой точности движений и сохранение всех функциональных возможностей оригинальной системы. Основная цель — добиться того, чтобы роботизированный манипулятор, собранный из недорогих материалов, мог выполнять задачи с той же степенью аккуратности и надежности без использования электричества для мобильных химико-биологических лабораторий.
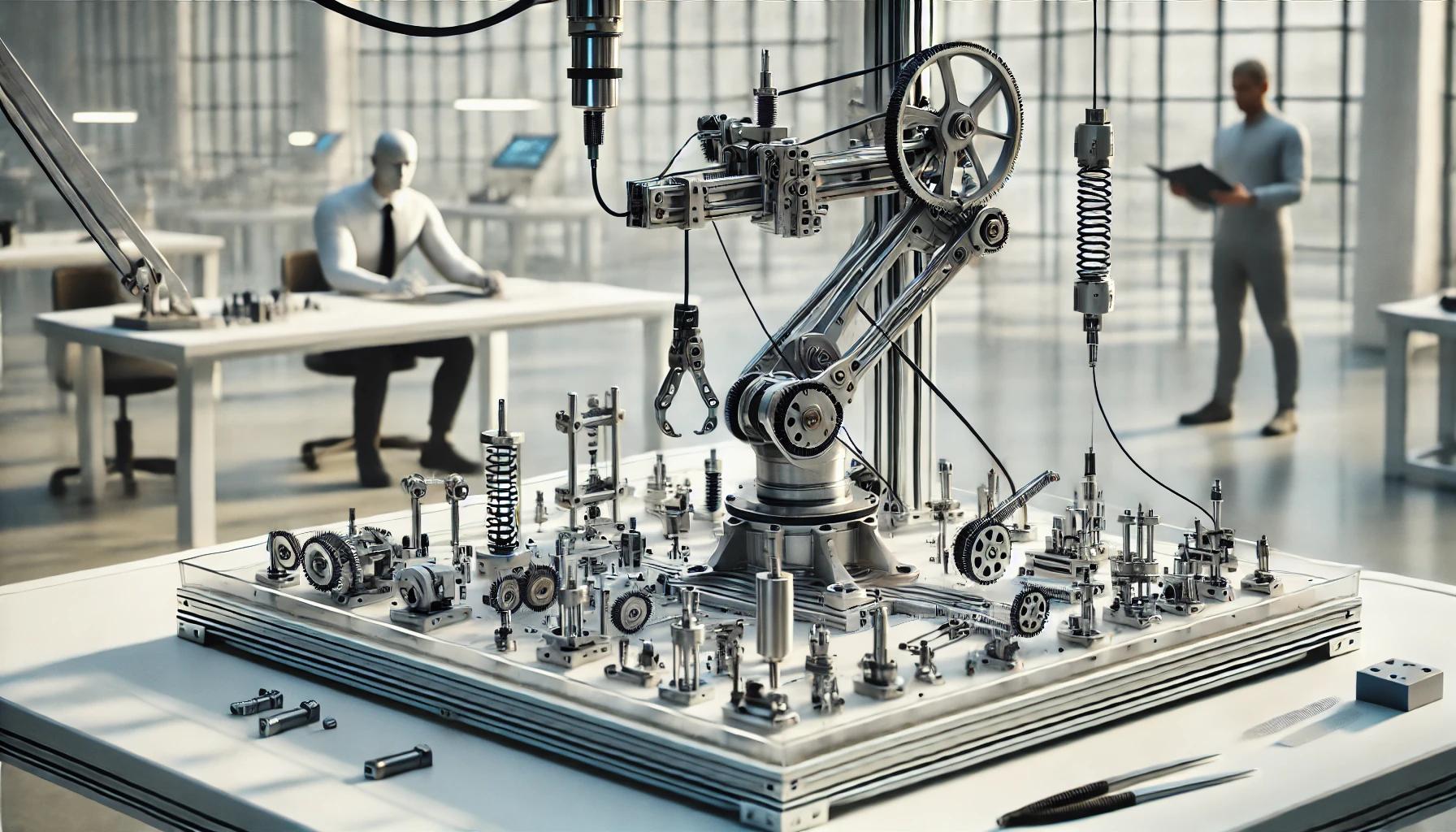
Предложение: был разработан 3D прототип механического манипулятора типа Мастер-Слейв. После утверждения цифровой версии материальный прототип был распечатан с помощью 3D принтера. Данный прототип функционировал исключительно за счет использования обычных механических принципов без электроэнергии. Разработанный прототип предполагает отказ от электроприводов, сенсоров и сложных электронных систем, что повысило надежность и безопасность эксплуатации устройства в рабочих/полевых условиях. После тестирования 3D прототип механического манипулятора смог эффективно выполнять свои функции, сохраняя при этом высокую точность и контроль над выполняемыми операциями.
Преимущества на рынке: В отличие от своих электронных аналогов, такой механический манипулятор обладает рядом значительных преимуществ. Прежде всего, он характеризуется более высокой доступностью, так как его конструкция основана на использовании простых и распространенных механических компонентов, таких как рычаги, шкивы, тросы и пружины, которые легко найти и заменить. Это существенно снижает стоимость как самого устройства, так и его обслуживания. Кроме того, механический манипулятор отличается простотой в ремонте. Поскольку он не содержит сложных электронных систем и сенсоров, техническое обслуживание и ремонт могут проводиться без необходимости специализированного оборудования и высококвалифицированного персонала. Любые неисправности могут быть быстро обнаружены и устранены даже в полевых условиях, что значительно сокращает время простоя и повышает надежность работы устройства.
Решение: Для передачи манипуляций в нашем механическом манипуляторе мы использовали тросовую систему. Эта система позволяет достичь высокой точности и надежности в управлении исполнительными элементами. В конструкции тросовой системы один конец троса надежно прикреплен к управляющей руке оператора, а другой конец – к исполнительной руке манипулятора. Кроме того, тросовая система позволяет использовать манипулятор в условиях, где электроника может быть ненадежной или где вообще отсутствует доступ к электроэнергии. Это делает наш манипулятор идеальным решением для работы в экстремальных или удаленных условиях, например, в глубоководных исследованиях, космических миссиях или в зонах с высоким уровнем радиации. Важно отметить, что механическая конструкция манипулятора тщательно продумана и выполнена таким образом, чтобы обеспечивать высокую точность и контроль над всеми движениями. Точные механические соединения и качественные материалы позволяют манипулятору выполнять задачи с той же степенью аккуратности, что и его электронные аналоги, делая его идеальным решением для применения в различных условиях, где доступ к электроэнергии ограничен или отсутствует. Таким образом, механический манипулятор типа Мастер-Слейв сочетает в себе доступность, простоту в ремонте и высокую точность, предлагая эффективное и надежное решение для широкого спектра задач.
Цель: Разработать и создать аналог роботизированного манипулятора Мастер-Слейв, применяя при этом бюджетные и легкодоступные компоненты, при этом не снижая уровня точности и качества манипулирования. Это предполагает поиск и использование экономичных альтернатив дорогим компонентам, обеспечение высокой точности движений и сохранение всех функциональных возможностей оригинальной системы. Основная цель — добиться того, чтобы роботизированный манипулятор, собранный из недорогих материалов, мог выполнять задачи с той же степенью аккуратности и надежности без использования электричества для мобильных химико-биологических лабораторий.
Предложение: был разработан 3D прототип механического манипулятора типа Мастер-Слейв. После утверждения цифровой версии материальный прототип был распечатан с помощью 3D принтера. Данный прототип функционировал исключительно за счет использования обычных механических принципов без электроэнергии. Разработанный прототип предполагает отказ от электроприводов, сенсоров и сложных электронных систем, что повысило надежность и безопасность эксплуатации устройства в рабочих/полевых условиях. После тестирования 3D прототип механического манипулятора смог эффективно выполнять свои функции, сохраняя при этом высокую точность и контроль над выполняемыми операциями.
Преимущества на рынке: В отличие от своих электронных аналогов, такой механический манипулятор обладает рядом значительных преимуществ. Прежде всего, он характеризуется более высокой доступностью, так как его конструкция основана на использовании простых и распространенных механических компонентов, таких как рычаги, шкивы, тросы и пружины, которые легко найти и заменить. Это существенно снижает стоимость как самого устройства, так и его обслуживания. Кроме того, механический манипулятор отличается простотой в ремонте. Поскольку он не содержит сложных электронных систем и сенсоров, техническое обслуживание и ремонт могут проводиться без необходимости специализированного оборудования и высококвалифицированного персонала. Любые неисправности могут быть быстро обнаружены и устранены даже в полевых условиях, что значительно сокращает время простоя и повышает надежность работы устройства.
Решение: Для передачи манипуляций в нашем механическом манипуляторе мы использовали тросовую систему. Эта система позволяет достичь высокой точности и надежности в управлении исполнительными элементами. В конструкции тросовой системы один конец троса надежно прикреплен к управляющей руке оператора, а другой конец – к исполнительной руке манипулятора. Кроме того, тросовая система позволяет использовать манипулятор в условиях, где электроника может быть ненадежной или где вообще отсутствует доступ к электроэнергии. Это делает наш манипулятор идеальным решением для работы в экстремальных или удаленных условиях, например, в глубоководных исследованиях, космических миссиях или в зонах с высоким уровнем радиации. Важно отметить, что механическая конструкция манипулятора тщательно продумана и выполнена таким образом, чтобы обеспечивать высокую точность и контроль над всеми движениями. Точные механические соединения и качественные материалы позволяют манипулятору выполнять задачи с той же степенью аккуратности, что и его электронные аналоги, делая его идеальным решением для применения в различных условиях, где доступ к электроэнергии ограничен или отсутствует. Таким образом, механический манипулятор типа Мастер-Слейв сочетает в себе доступность, простоту в ремонте и высокую точность, предлагая эффективное и надежное решение для широкого спектра задач.